Anycast RP in MSDP
This section describes the Anycast RP implementation process in a PIM-SM domain.
Applicable Environment
In a traditional PIM-SM domain, each multicast group is mapped to only one Rendezvous Point (RP). When the network is overloaded or the traffic is too heavy, many network problems occur, such as the heavy pressure of the RP, the slow convergence after the RP fails, and the non-optimal multicast forwarding path.
Therefore, anycast RP is introduced in MSDP. After anycast RP is enabled in MSDP, multiple RPs can be configured with the same loopback address in a PIM-SM domain, and MSDP peer relationships are established between these RPs. As a result, the path destined for the RP is optimal, and load balancing is implemented among RPs.
To sum up, anycast RP can properly address the problem of heavy loading on a single RP in a PIM-SM domain, which is caused by the convergence of all multicast source information and multicast join information on the RP. Meanwhile, anycast RP ensures the path destined for an RP is optimal because the receiver and multicast source join and register to the nearest RP.
Principles
As shown in Figure 1, in the PIM-SM domain, the multicast sources, S1 and S2, send multicast data to the multicast group G that contains multicast members, U1 and U2.
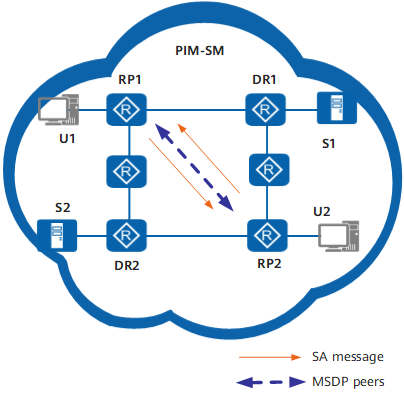
The implementation of anycast RP in a PIM-SM domain is shown as follows:
Establish the MSDP peer relationship between RP1 and RP2, and enable multicast in the PIM-SM domain through the MSDP peers.
The receiver sends a Join message to the nearest RP to set up a rendezvous point tree (RPT) tree. In addition, the multicast source registers to the nearest RP, and RPs sends each other Source Active (SA) messages to share the multicast source information.
RPs join the Shortest Path Tree (SPT), whose root is the multicast source Designated router (DR). Then RPs receive and forward multicast data. After the receiver receives the multicast data, it determines whether to initiate the SPT switchover.